Hummingbird Troubleshooting
- theandybrock
- Aug 3, 2022
- 2 min read
Updated: Oct 12, 2022
We'll also have to build a real life model of a nanosatellite including functions required. But we ran into problems when we barely even started. Here's the problem: we discovered that we couldn't control the servo motor, which is one of the three important aspect of IOT, through our micro:bit. At first I suspected that it was some kind of a power problem, but decided to do some tests making sure that other parts are also good to go, because who knows what would have happened to a electronic that has been lying in the storage for 2 years.
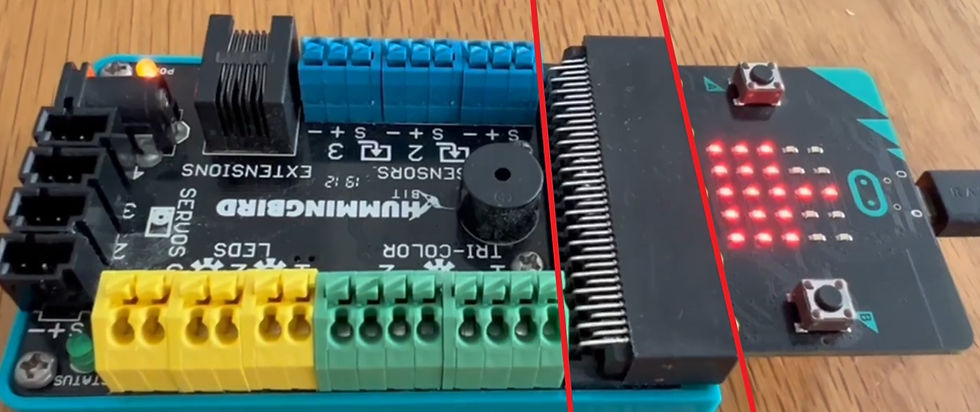
As picture shown below, first thing I did was taking this as 3 different sections, micro:bit itself, edge connector, and hummingbird, so the method would be testing them one by one by this order since it's the same sequence of how they get commands. We can all clearly see below that the micro:bit processor was working properly given the fact that the LEDs' operating correctly. Next up would be testing if the edge connector is working properly.
To assess the functionality of the edge connector, I had to opt-for another function on the hummingbird to confirm whether the edge connector it is that's affecting the servo. In this case I chose the buzzer as it emits sound making it a convenient object to observe. Results can be clearly seen(heard) from the following video.
Yep, it's totally working and not going to lie, it's really annoying. So far we know that everything is working before the servo motor, so the problem must be on it. Quickly ran some test only finding that it's not even close to be functioning, but little jitter can be seen when plug in to the port. This brings me back to my initial thought brought by instinct, power problem.
It's not until I opened up the battery pack discovering some little fault in it which I forgot to take a picture but I did my best to recreate the situation, as shown below. This is the problem that's creating the malfunction of our servo, and that's a problem solved.


Comments